
Luke Bhan
I build algorithms for controlling physical systems that combine machine learning with structure to provide provable guarantees.
Pure learning is fast but unaccountable; classical control is rigorous but requires domain expertise and lacks scalability. My research fuses their strengths, building ultra-fast controllers for robots, vehicles, and biological systems that act in real time and provide theoretic performance guarantees.
I am on the academic job market this year and excited to find the right fit. I'd love to connect, reach me at lbhan@ucsd.edu.
Research
Algorithms that capitalize on the performance of machine learning, with the provable certificates needed for deployment in real-world physical systems. I tell an engineer exactly how accurately to train their controller and, from the loss it reaches, the closed-loop performance it will achieve.
A car-like vehicle has different delays on its steering and acceleration. A separate neural-operator predictor compensates each one, so it still drives cleanly to its target.
An age-structured population is steered to a target equilibrium, with the stabilizing control gains learned online from the population's birth and mortality rates.
A manipulator performs a fast task through a long actuation delay. Without compensation the delay destabilizes the loop and the task fails; a neural-operator predictor reconstructs the future state so the same task completes, with a stability guarantee.
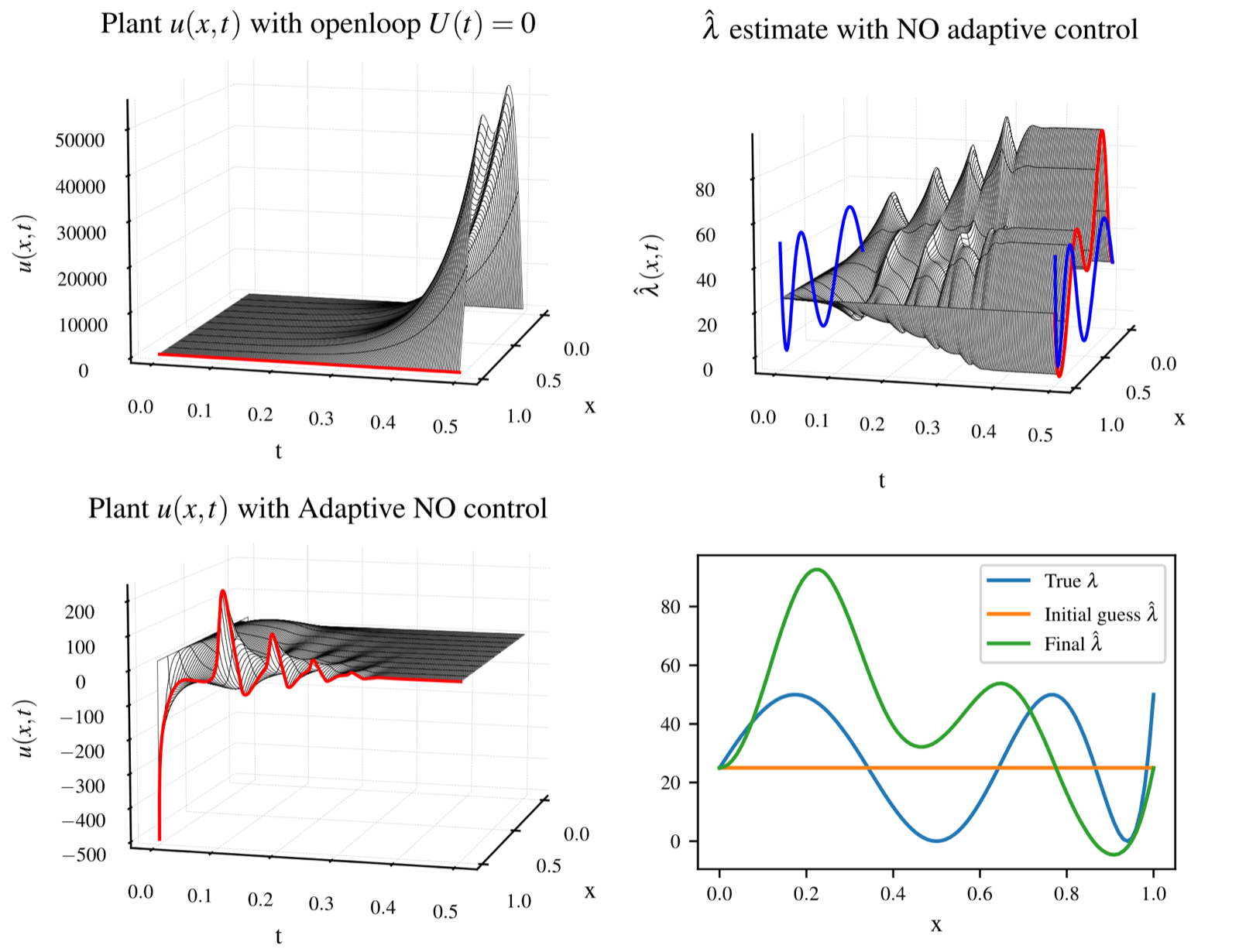
Stabilizing a PDE from its boundary requires solving a kernel PDE for the control gains, recomputed for every new plant. A neural operator learns that gain-kernel map directly, preserving the stability guarantee while replacing the expensive solve, and even adapting it online when the plant's coefficients are unknown.
About
I'm a doctoral candidate at UC San Diego in Intelligent Systems, Robotics & Control (ECE), advised by Yuanyuan Shi with mentorship from Miroslav Krstić. My PhD is supported by the DOE Computational Science Graduate Fellowship.
My goal is a single, rigorous toolkit (operator learning with formal control-theoretic guarantees) that transfers across domains rather than being rebuilt for each one. The same methods that stabilize a partial differential equation 1000× faster than classical solvers also plan robot motion that generalizes across environments, and steer biological and traffic systems in real time. I work on problems where guarantees are not optional.
Before UCSD I studied physics, applied math, and computer science at Vanderbilt University in an accelerated BS/MS program, advised by Gautam Biswas and Kálmán Varga.
Teaching & service
In the ChatGPT era, I think the most valuable part of a classroom is the people in it, the peers and colleagues you get to think alongside. So in the lectures I help teach, I try to lean on participation and discussion rather than one-way delivery. I have mentored seven undergraduate and master's researchers. Three became publication coauthors, and three former mentees subsequently entered graduate programs at ETH Zurich, UC San Diego, and the University of Wisconsin.
Mini lecture series
A 4-lecture introduction to scientific machine learning, recorded from the live classes I help teach within Physics-Informed Machine Learning at UC San Diego.
See the lectures → Watch on YouTube ↗
Courses & assistantships
Peer review