Research
Algorithms that capitalize on the performance of machine learning with the provable certificates needed for deployment in real-world physical systems
The power of modern neural networks is clear, but physical systems cannot go into the real world without guarantees on performance and safety. My research makes black-box neural networks deployable for real systems: I tell the engineer exactly how accurately to train their controller and, from the loss it reaches, the closed-loop performance it will achieve, and how gracefully that degrades as the network's error grows.
 backstepping kernels
backstepping kernels
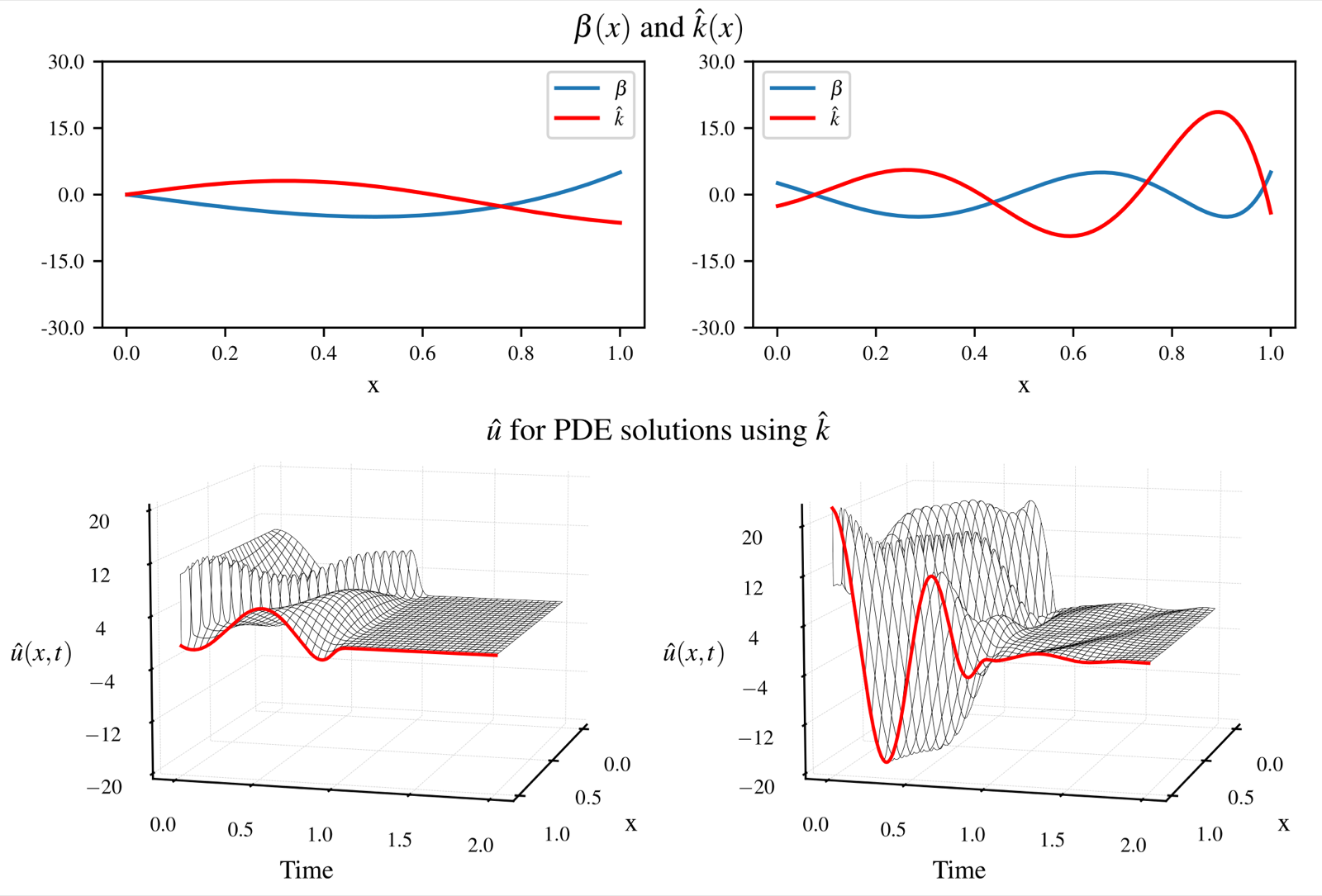
A neural operator learns the backstepping gain kernel that stabilizes the PDE, reproducing the exact kernel while replacing a costly numerical solve with a single forward pass that runs orders of magnitude faster.
Foundations
Design of deployable ML systems, with closed-loop performance guarantees
This is the engine behind everything else I do. Classical control earns its guarantees by solving heavy numerical routines, such as backstepping kernel PDEs or predictor integrals, that are provably correct but far too slow to recompute online. I showed these computations are operators a neural network can learn, and proved the learned approximation preserves the closed-loop stability guarantee. The expensive solve collapses into a single forward pass and the proof travels with it: control at machine-learning speed, on real systems, without giving up certification.
- Neural Operators for Bypassing Gain and Control Computations in PDE Backstepping
- Neural Operators of Backstepping Controller and Observer Gains
- Adaptive Neural-Operator Backstepping Control of a Benchmark Hyperbolic PDE
- Stabilization of Nonlinear Systems with Unknown Delays via Delay-Adaptive Neural Operator Approximate Predictors
Same input delay: uncompensated (left) vs. stabilized in real time by a neural-operator predictor (right).
Robotics & autonomy
Autonomy that generalizes, with guarantees via operator learning
Robots break the clean assumptions controllers are designed under: they act through real communication and actuation delays, and they have to work in environments they never saw in training. I address both with operator learning. A planning neural operator learns the cost-to-go for navigation and generalizes to maps far finer than the ones it trained on, while a learned predictor reconstructs the delayed state in a single forward pass so the controller acts on time, carrying the same stability guarantee as the classical predictor it replaces. Both results rest on the same scientific-machine-learning principle: I encode the problem's structure into the network itself (e.g. the triangle inequality explicitly enforced in the neural net design), so performance and certifiable deployment come built in.
A car-like unicycle reaches its target despite different delays on its steering and acceleration inputs, with a separate neural-operator predictor compensating each delay so the system stays stable.
Scientific systems & open tools
Traffic, biology, and more applications of neural operator control design
The same machinery reaches well beyond the PDEs it started on. When a vehicle receives several control inputs that each arrive after a different delay, I assign one neural-operator predictor per input, compensating all the distinct delays at once with a stability guarantee. For biological populations, where the stabilizing gains depend on birth and mortality rates that are unknown and must be identified online, a neural operator learns the control-design map and re-evaluates it instantly as those estimates update, steering an age-structured colony to its target equilibrium. To let others build here, I co-created PDEControlGym, an open, documented benchmark for data-driven boundary control spanning physics, biology, and medicine, supported by an NVIDIA Academic Grant.